|
| Solution for the Magnet Robot and ROBO Pro
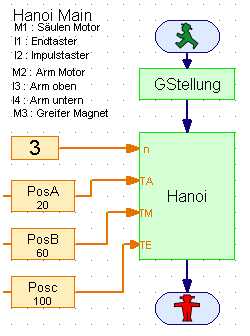
Something more general about robot and the logic of the program on the german Hanoi-Seite The samples of ROBO Pro contain a Hanoi Robot using the Industry Robot. It is a complex solution which uses all components of that robot. The Hanoi-Seite shows solutions for the more simple robot above for different programming languages. On this page a solution for ROBO Pro and the ROBO Interface is discussed. You can operate it as well with the Intelligent Interface (Online Mode). The discussed - graphical - solution corresponds in construction and naming to the textual solutions. The most interesting subs are discussed here - some notes to LLWin are included -, the complete program is contained - together with some other solutions - in HanoiRob.ZIP. The Main Program
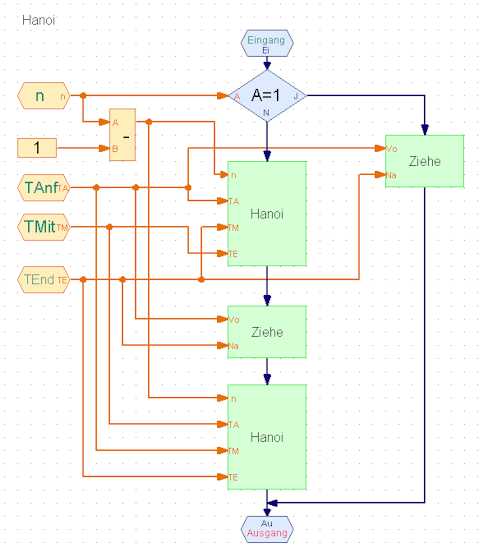
The Logic of Hanoi
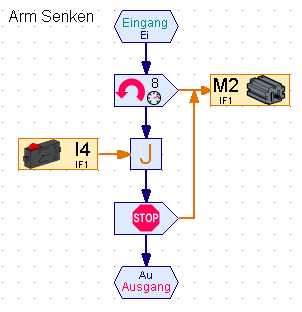
The jumping point of the Hanoi logic is the artificial changing of the actual positions of the pile parameters to the recursive calls. The real move of a disc goes nearly undercover. This sub is nearly the same coming with the Hanoi sample of ROBO Pro. Difference : In the actual version the end of recursion is determined by n = 1 (A=1), an additional recursive level less, therefore an additional call Ziehe (Move) in the end case. The ROBO Pro solution asks for n = 0. This is a program with many yellow lines because of the call parameters in the 6edged boxed are used several times. Return parametes are possible to, but not used here. ROBO Pro doesn't have textual expressions (like LLWin). In this case too a graphical operator is used for subtracting n - 1. On logical expressions it is done in the same manner. General : ROBO Pro offers a level concept from level 1 - 3. Level 1 / 2 are very similar to LLWin, but have no variables. Level 3 introduces variables and a concept of separate data (yellow) and control (black lines) flow. ASenken : Arm down
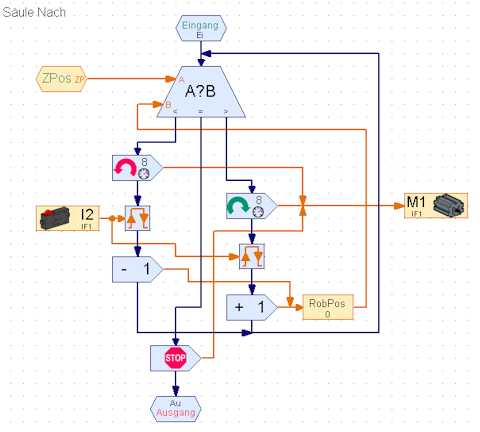
SNach : Drive to a Pile Position
The further subs are simple and only repeat the ROBO Pro elements discussed already. Update (dd.mm.yy) : 10.03.2005 |