|
| | Über das Scheibenschichten
Ein Stapel von immer kleiner werdenden Scheiben soll über eine
Zwischenstation auf einen neuen Platz gestapelt werden. Immer eine aufeinmal und
stets die kleinere Scheibe auf die größere.
Die Lösung dieses Problems erfreut sich im Informatik-Unterricht großer
Beliebtheit (bei den Lehrern). Es gibt deswegen auch immer wieder Lösungen zu
diesem Problem. fischertechnik hat bereits im Kasten Computing von 1984 das
Modell eines Hanoi-Roboters angeboten. Auf dieser Site finden sich ebenfalls
einige Lösungen für das Problem :
- WinLogo Lösung für den Hanoi
Robot von 1984
- VB6 Lösung für den Industry Robot von 1998
- VB6 Lösung für den LynxMotion Robot
Hier Lösungen für VBA mit vbaFish, JScript
mit mscFish, VB.NET, C#.NET, Python
und Delphi, alle nutzen FishFa30/umFish30.DLL :
Die manuelle Lösung
Das nachfolgende kleine Programm Hanoi.ftC (es wurde im PC Magazin Nr. 22 von
1988 als Quick Basic Lösung veröffentlich) gibt im Debug-Fenster eine
Lösungsanweisung für das manuelle Umschichten aus :
Sub Main
Dim n&
n = InputBox("Anzahl Scheiben")
Debug.Clear
Debug.Print "Spiel mit" & n & " Scheiben"
Hanoi n, "Links ", "Mitte ", "Rechts"
End Sub
Sub Hanoi(n&, TAnf$, TMit$, TEnd$)
If n = 1 Then
Debug.Print "Scheibe von " & TAnf & " -> " & TEnd
Else
Hanoi n-1, TAnf, TEnd, TMit
Debug.Print "Scheibe von " & TAnf & " -> " & TEnd
Hanoi n-1, TMit, TAnf, TEnd
End If
End Sub |
Kern ist das Unterprogramm Hanoi, das aus einer einzigen If-Anweisung
besteht. Wenn die Anzahl der Scheiben auf dem Stapel bei 1 angekommen ist, wird
direkt vom aktuellen Quellstapel zum Zielstapel geschichtet, sonst wird dreimal
hin und her geschichtet. Trick dabei ist der rekursive Aufruf von Hanoi (das
Unterprogramm ruft sich selber auf).
Achtung : Zur Anzeige der Lösung ist im Menü Ansicht die Option 'Immer teilen'
einzustellen
Die Anweisung Debug.Print "Scheibe von " & TAnf & "
-> " & TEnd, die zweimal im Programm auftaucht, ist nun durch eine
Anweisung Ziehe zu ersetzen, die einen Robot überredet tätig zu werden, ganz
wie im manuellen Verfahren. Dazu ist dann erstmal ein Robot erforderlich :
Der Hanoi Robot
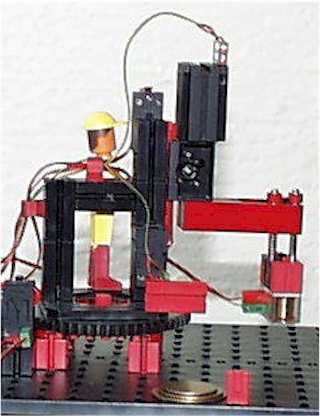
Der Hanoi Robot ist ein Eigenbau der auf dem Schweißroboter-Chassis des
Computing Starter Kits basiert. Er entspricht hier weitgehend dem Hanoi Robot
von 1984. Allerdings wurde die Technik modernisiert :
M1 : Säulenmotor mit Impulsrad und Endtaster an E1, Impulstaster an E2
M2 : Armmotor mit Endtaster oben E3 und unten E4
M3 : Gefedert gelagerter Magnet (neuere Version bei Knobloch
: 32363 - 17,20 Euro)
Gestapelt werden die Eisenscheiben, die im Bild vorn (PosA) neben dem Winkel
liegen. Verdrahtet wurde "fliegend".
Der Säulenroboter der Industry Robots II
als Tonnenstapler
 |
Man kann auch den Säulenroboter überreden, die gelben
Tonnen im Sinne von Hanoi zu stapeln. Dafür wurden um ihn herum drei
gelbe Kästchen plaziert (damit er nicht so tief herunter muß). Das
Programm dazu entspricht weitgehend dem für den Eisenscheibenstapler und
ist in Versionen für VBA und C#.NET ebenfalls in HanoiRob.ZIP
enthalten. Für die VBA-Lösung wird vbaFish40
und für die C#-Lösung wird neben einer installierten C#-IDE noch umFish40.ZIP
benötigt. |
Die Routinen
| ------- |
Hanoi-Logik |
| Ziehe(Von, Nach) |
Ersatz für die manuelle Arbeitsanweisung : Zerlegt in
Hole(Von) und Bringe(Nach) |
| Bringe(Pos) |
Ablegen einer Scheibe auf der gewünschten Zielposition
:
SauleNach(Pos), ArmSenken, ScheibeGreifen, ArmHeben |
| Hole(Pos) |
Aufgreifen einer Scheibe von der angegebenen Quellposition
SauleNach(Pos), ArmSenken, ScheibeLegen, ArmHeben |
| ----- |
Robot-Ansteuerung |
| SauleNach(ZielPos) |
Fahren auf die Zielposition. Die Position wird durch eine
Impulsrad bestimmt |
| ArmSenken |
Senken des Greiferarms bis zum Endtaster |
| ArmHeben |
Heben des Greiferarms bis zum Endtaster |
| ScheibeLegen |
Einfach : Magnet aus |
| ScheibeGreifen |
Auch einfach : Magnet ein |
| ----- |
DrumRum |
| Grundstellung |
Fahren auf Grundstellung ( Robot auf PosA, Armhoch, Magnet
aus) |
| Init |
Besetzen der globalen Variablen. Dabei auch festlegen der
Werte für die drei Stapelpositionen PosA, PosB und PosC |
Die Sources
Das komplette VBA Programm gibts gleich zweimal :
- HanoiRobot.ftC : Eine all-in-one Lösung. Alle beschriebenen Routinen sind
in einer Source enthalten
- HanoiMain.ftC/HanoiRobot.CLS : Die Robot-Ansteuerung wurde in eine
separate Klasse ausgelagert. Hier wohl kaum erforderlich. Mehr um zu zeigen,
wie man mit vbaFish auch Klassen einsetzen kann. Die Programme sind
funktional gleich
eine Perl-Lösung :
- Hanoi.PL : Ein File mit dem kompletten Programm.
dann gleich noch einmal für Python :
- HanoiRobot.PY : Ein File, aber wie bei HanoiMain/HanoiRobot wurde die
Robot-Ansteuerung in eine Klasse ausgelagert. Getestet wurde mit PythonWin.
Ablauf auch als rreine Konsolapplikation.
für Delphi :
- poorHanoiRob.DPR : Eine all-in-one Lösung auf Basis des Templates
poorFish30. Alle beschriebenen Routinen sind in einer Source enthalten,
Konsolprogramm.
und für JScript :
- HanoiRob.JS : Eine Lösung auf Basis von Unterprogrammen (function)
- HanoiRobC.JS : Eine Lösungsvariante unter Verwendung eines Objects
(Klasse), das die Robot-Methoden kapselt.
und dann noch VB.NET und C#.NET:
- HanoiRobot : Eine Windows Lösung unter Nutzung der Klasse HanoiRob.
und jetzt auch noch eine ROBO Pro-Lösung
Alles zusammengefaßt in HanoiRob.ZIP.
Zusätzlich ist noch vbaFish30Setup.EXE
(VBA) bzw. PythonFish30.ZIP (Python), vbFish30Setup.EXE
(Perl), umFish30.ZIP (C#, VB.NET) oder delphiFish30Setup.EXE
(Delphi) erforderlich (Auf der jeweiligen Seite wird das genauer erklärt). Außerdem die zugehörenden Entwicklungssysteme -
Ausnahme : vbaFish30, da ist schon alles dabei.
Stand : 07.11.2005
|