|
| | Scan der Umgebung mit ROBO TX und Excel VBA
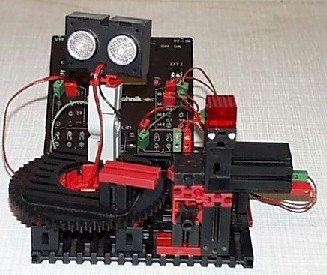 |
Drehkranz angetrieben durch Motor an M1 mit
Endtaster an I1 und Impulstaster an C1. UltraschallSensor (ersatzweise
auch Photowiderstand) an I8, sowie rote Lampe an O3 Programm RadarTurm :
Der Turm oszilliert zwischen Position 0 und 100. Dabei wird alle 10
Impulse der am Ultraschallsensor gemessene Abstandswert in cm ausgegeben.
Bei Unterschreiten einer vorgegebenen Distanz wird die rote Lampe
eingeschaltet.
|
Programm RadarTurm Fall :
Private tx As New FishFace50
Private Const mTurm = 1
Private Const sFull = 512
Private Const dLinks = 1
Private Const dRechts = 2
Private Const dAus = 0
Private Const oLampe = 3
Private Const cImpuls = 1
Private Const iEndtaster = 1
Private Const iDistance = 8
Private Const Schrittweite = 10
Private Const DistLimit = 16
Private Sub cmdAction_Click()
Dim res, i As Long
res = tx.OpenController(39)
If res <> 0 Then
lblStatus = "FAILED"
Exit Sub
End If
tx.SetMotor mTurm, dLinks
tx.WaitForInput iEndtaster
tx.SetMotor mTurm, dAus
Do
For i = 0 To 100 Step Schrittweite
Distance dRechts, i
Next
For i = 100 To 0 Step -Schrittweite
Distance dLinks, i
Next
Loop Until tx.Finish()
tx.CloseController
lblStatus = "--- FINIS ---"
End Sub
Private Sub Distance(ByVal turn&, ByVal pos&)
Dim dist, diff As Long
If tx.Finish() Then Exit Sub
dist = tx.GetDistance(iDistance)
If dist < DistLimit Then
tx.SetLamp oLampe, True
Else
tx.SetLamp oLampe, False
End If
lblStatus = "Position : " & pos & " Distanz : " & dist
DoEvents
tx.StartRobMotor mTurm, turn, sFull, Schrittweite
diff = tx.WaitForMotor(mTurm)
lblHinweise = "Abweichung : " & diff
End Sub
Anmerkungen :
- cmdAction : Herstellen der Verbindung zum TX Controller an COM39 (auf eigenen
Wert ändern)
- Anfahren der Home-Position linksdrehend
- Drehen um Schrittweite nach rechts, Anzeige der aktuellen Position und der
festgestellten Entfernung
in Sub Distance
- Zurückdrehen in Schrittweite.
- Beenden durch ESC-Taste
Download
Sources enthalten in FishFaceVBA.ZIP
Weitere Radartürme sind auf radar.htm und radarex.htm
zu bewundern.
Stand : 29.08.2010
|