|
| | Operating Stepper Motors
Is an interesting point. ROBO Interface doesn't support it directly.
Therefore on this place a little library to do it. Constructed in the style of
the delivered Position ES library. It contains subs for operating single stepper
motors using ROBO Pro. It works more slow than quick, but it is nice to look
them working.
Operating them as X/Y-couples (plot mode) seems me to be too complicated. I
think, changing to the compatibility mode and operating them with e.g. C#
(in german) and the assembly FishFa30.DLL
(in german, class FishStep) is the better solution.
For notes to operate steppers look to Schritt1
and Schritt2 (in german). The described timing for
the Intelligent Interface is nearly the same for the ROBO Interface.
The ROBO Pro solution shown here, has ben tested with the ROBO Interface -
USB - ROBO Pro and the Intelligent Interface - COM - ROBO Pro.
The Test Assembly
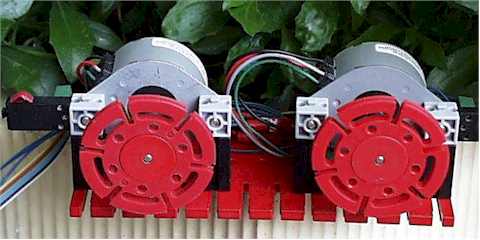 |
Very simple : Motor on the left connected to
M1/M2 with end switch I1, motor on the right connected to M3/M4 with end
switch I3. This a pure experimental construction. To simulate home
position, the appropriate end switch must be pressed manual.
Wiring : M1 + (front pin) :
red line, - : black
M2 + : gray, - : green.
|
The Main Program
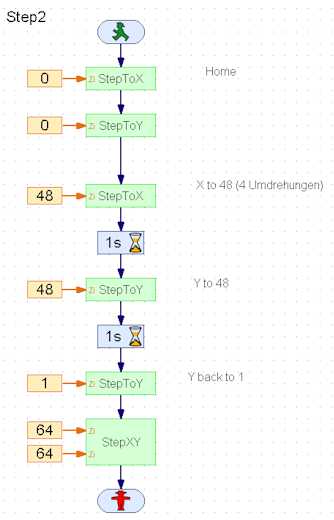 |
Is very simple :
One sub call followed by the next and some pauses to look for results.
Drive to home position. The position 0 has a special meaning. In this
case no steps are counted, it runs until the end switch is pressed.
Run to position 48 (counted from end switch) with the left motor.
Run to position 48 (counted from end switch) with the right motor.
Back to 1
Running simultanously to position X = 64 and Y = 64. Because of there
is no interpolation, first it runs with an angle of 45° and than linear.
In this case only 45°.
|
Rechts : Running Right
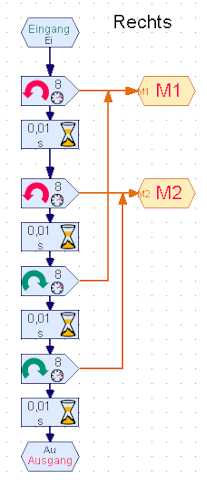 |
Used to run a stepper to the right :
M1 : left, Pause 10 ms
M2 : left, Pause 10 ms
M1 : right, --
M2 : right
The motors offered by fischertechnik or Knobloch
have 7.5° steps. A cycle with 30° therefore is the smallest unit to be
controlled (12 cycles = 1 revolving).
|
StepTo : Running to Position
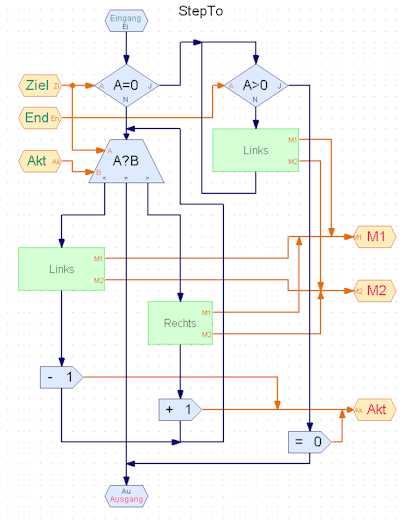 |
Correponds mostly to the library sub Pos from Position ES. Impulse
counting was replaced by subs Links and Rechts.
The Links (left) on the right side is responsible for running home (to
end switch).
|
StepToX : Running to Position X
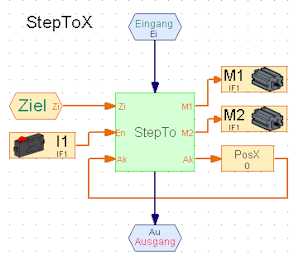 |
To simplify the practical use, motors, switches and global variables are
fixed for running X.
|
StepToXY : Running to Position X/Y
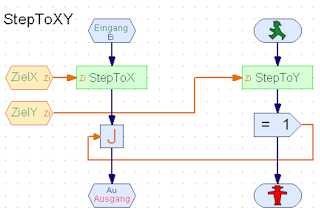 |
The subs StepX and StepY as X/Y-couples. Y thereby runs in its own thread,
which is started with the sub call and and by reaching position.
Notice : The motors run independent from each other, therefore there is
no straight line between two points. Look above.
|
Update (dd.mm.yy) : 10.03.2005
|