|
|
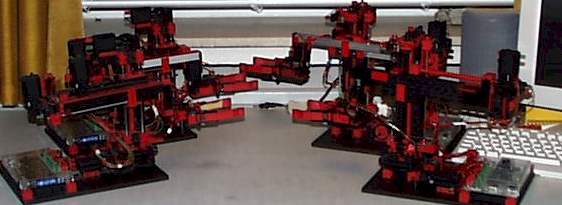
Übersicht Säulenroboter
Viermal Säulenroboter. Von links : Der original Säulenroboter der Industry Robots von 1998, der Säulenroboter getunt : Alu-Arm und tiefergelegter Greifermotor, PowerMotor zum Antrieb der Säule, der aktuelle Säulenroboter der Industry Robots II von 2005 und die getunte Version : Alu-Arm und rote Power für den Säulenantrieb. Ein fertiges TeachIn-Programm dazu gibt es als ftTeach40 - fertig compiliert - Ready-To-Run und als Delphi4 Source. Bei VB2005 gibt es eine kleine Beispiel Application für den listengesteuerten Betrieb Interface-BelegungDie Interface-Belegung ist bei allen hier gezeigten Robots und Interfaces
gleich (Der I-Eingang des ROBO Interfaces wird beim Intelligent Interface mit E
bezeichnet) : Die Drehrichtung links entspricht einer Bewegung in Richtung Endtaster. Die DLLs FishFace40 / umFish40 unterstützen diese einheitliche
Anschlußbelegung besonders durch die Einführung eines RobMotors mit fester
Zuordnung der Taster. FishFace40 bietet zusätzlich in einigen Sprachversionen
eine zusätzliche Klasse FishRobot mit den Methoden MoveTo, MoveHome ... zum
simultanen Betrieb aller Motoren eines Robots. Extra zum Test der Industry Robots wurde das FishPanel um die Anzeige der ImpulsCounterstände erweitert. Mit Klick auf den Counter kann ein einzelner Counter zurück gesetzt werden, durch RESET alle. IR1org : Säulenroboter, das Original
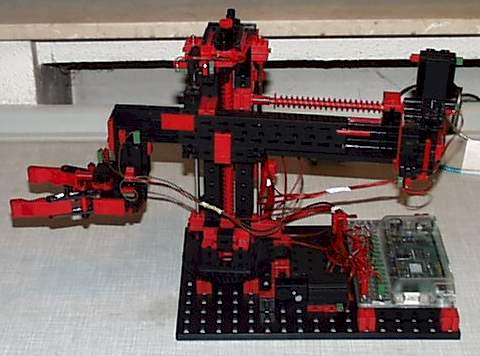
Der Säulenroboter im Originalaufbau mit leicht hängendem Arm. Steuerung über Intelligent Interface Robot-DatenC# Instanzierung : private FishRobot r = new FishRobot(new int[,]
{{1,222}, {2,155}, {3,144}, {4,26}}); Säule : ca. 180° Drehwinkel, 0,8 pro Impuls - 10 sec für 150 Impulse Parkposition wie im Bild gezeigt : r.MoveTo(112, 0, 20, 0); IR1alu : Modifizierte Version
Der gleiche Säulenroboter nach einer Renovierung : Anstelle der schwarzen
Grundbausteine 30 von 1998 wurde ein Alu-Profil von 1985 eingebaut. Greifermotor
und Greifer wurden unter dem Arm angebaut, der Aufbau entspricht dem des
aktuellen Säulenrobots von 2005. Zusätzlich wurde noch der S-Motor durch einen
Power-Motor mit einer Gesamt-Untersetzung von 25 : 1 eingebaut. Robot-DatenC# Instanzierung : private FishRobot r = new FishRobot(new int[,]
{{1,222}, {2,155}, {3,144}, {4,26}}); Säule : ca. 180° Drehwinkel, 0,8 pro Impuls - 6 sec für 150 Impulse Parkposition wie im Bild gezeigt : r.MoveTo(100, 0, 20, 0); IR2org : Säulenroboter - Das Original
Der Säulenroboter der Industry Robots II von 2005. Steuerung über ROBO Interface. Robot-DatenC# Instanzierung : private FishRobot r = new FishRobot(new int[,]
{{1,222}, {2,155}, {3,144}, {4,26}}); Säule : ca. 180° Drehwinkel, 0,8 pro Impuls - 10 sec für 150 Impulse Parkposition wie im Bild gezeigt : r.MoveTo(110, 0, 20, 0); IR2alu : Säulenroboter - Modifiziert
Der Säulenroboter der Industry Robots II von 2005. Modifiziert : Alu-Arm und roter PowerMotor mit Gesamtuntersetzung von 25 : 1. Steuerung über ROBO Interface (im Bild noch Intelligent Interface). Robot-DatenC# Instanzierung : private FishRobot r = new FishRobot(new int[,]
{{1,222}, {2,155}, {3,144}, {4,26}}); Säule : ca. 180° Drehwinkel, 0,8 pro Impuls - 6 sec für 150 Impulse Parkposition wie im Bild gezeigt : r.MoveTo(110, 0, 20, 0); VergleichzeitenUm die unterschiedlichen Leistungen im Praxiseinsatz beurteilen zu können, wurde das Hanoi-Programm zum Tonnenstapeln zum Vergleich herangezogen. Genutzt wurde die vbaFish40-Version mit Basis umFish40.DLL / FtLib (v0.38). Es wurde stets mit dem gleichen Netzteil gearbeitet. Die angegebenen Werte sind gerundete Mittelwerte.
Die Zeiten von IR2 sind deutlich besser, das dürfte aber vor allem am stärkeren Einsatz der PowerMotoren liegen. Hinzukommt, dass der Arm nicht horizontal (mit einheitlich S-Motor) bewegt wurde. Details zum Einbau der roten Power-Motoren 50 : 1Die Motoren wurden durch ein 20er Zahnrad auf der Motorwelle und desweiteren 10er Zahnräder auf eine Gesamtuntersetzung von 25 : 1 gebracht. Einbau siehe Bilder :
Alternative zum Standardgreifer : Der von der Industrie-Version
Stand : 06.12.2008 |