|
| Debuggen mit dem Visual Studio
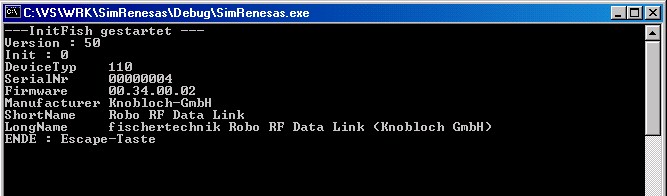
Die Debug-Möglichkeiten mit der Renesas-IDE sind naturgemäß recht eingeschränkt. Da die ROBO TransferArea sowohl auf dem PC wie auch im ROBO Interface die gleichen Daten vorhalten, bietet sich eine Simulation auf dem Visual Studio auf Basis von VC++ 6.0 an. Dabei kann der Mobil Robot sowohl über USB direkt angeschlossen sein (den Robot sollte man dann auf Grundsteine 30 "aufbocken") oder auch über das RF-Datalink angesteuert werden. Das Bild zeigt die Standard-Ausgaben des Konsol-Programmes. Angeschlossen ist der Robot über RF-Datalink (DeviceTyp 110). Ende hier durch die Escape-Taste. Die vorliegende Version hat Beispiel-Charakter. (z.Zt. (22.2.06) ist augenscheinlich bei fischertechnik noch ein Multitasking-Support in der Mache. Bei dessen Vorliegen könnte sich sicher hier auch noch etwas rühren.
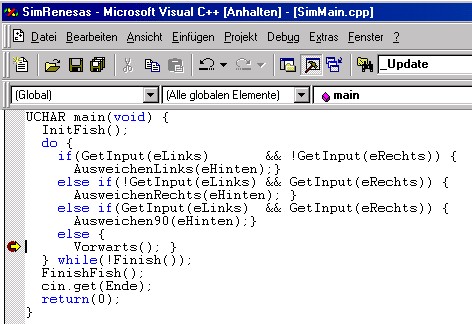
Für das Testen selber können die Möglichkeiten des Visual Studios voll genutzt werden. Hier ist eine Stop-Adresse gesetzt. Stand : 25.05.2006 |