|
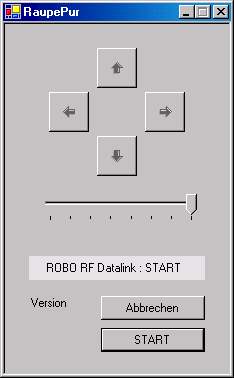
| Raupe pur : Steuerung über das ROBO RF DataLink
Chassis der Power Bulldozer 16 552 (Version mit 2 Motoren), ROBO Interface drauf, Akku darüber, fertig. M1 : linker Motor, M2 rechter Motor. Sonst nichts, aber nicht vergessen : ROBO RF Datalink an USB anschließen. Ziel der Übung : Fernsteuerung des stattlichen Fahrzeuges über den PC. Hier eine C# .NET Lösung Anmerkungen zum C# BetriebsprogrammEingesetzt wurde FishFace40.DLL mit der aktuellen umFish40.DLL v4.0.3, die getrennt zu laden ist. ROBO Interface Firmware ab v1.53.0.03 und 0.34.0.02 für das RF DataLink und die Platine im Interface.
Der Parameter e liefert die aktuell gedrückte Taste. Die Beschriftung der Tasten cmdAction (hier "START") und cmdEnde (hier "Abbrechen") wird zur Steuerung des Programmendes genutzt. cmdAction wird dazu nach dem OpenInterfae auf Enabled = false gesetzt um eine wiederholte Bedienung zu unterdrücken. cmdEnde schließt bei Beschriftung "HALT" die Interface Verbindung und bei "ENDE" das Programm. Anmerkungen zum ROBO Pro Programm
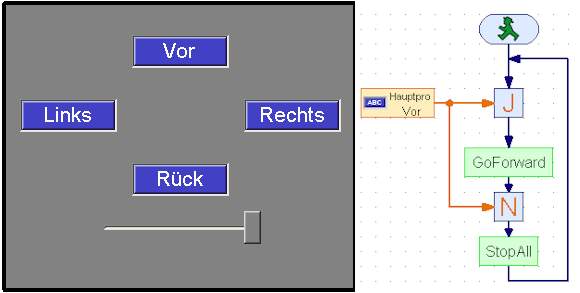
Eingesetzt wurde Level 3 mit 4 Threads in denen jeweils ein Steuerungstaste abgefragt - für eine Richtung - abgefragt wird. Zu Eingang des Threads auf Ja, dann wird das zugehörende UP aufgerufen und danach wird gewartet, bis der Bediener den Zeigefinger wieder losläßt. Entspricht in der C#-Lösung den Ereignisroutinen MouseDown und MouseUP. Ich bin meiner Marotte treu geblieben und habe das Bedienpanel auf der Seite des Hauptprogramms plaziert, ist mir immer noch bequemer. Raupe mit Greifer
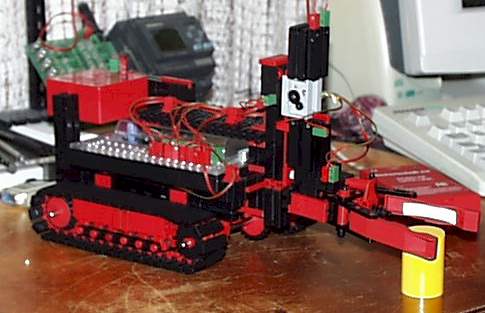
Fahrgestell wie oben. Das Interface wurde mit einer kleinen schwarzen
Bauplatte überdacht, vorn wurde ein Hubgetrieb angebaut (siehe FTS Mobile
Robots II) und am Getriebe hängt ein Greifer, der nach dem des Säulenrobots II
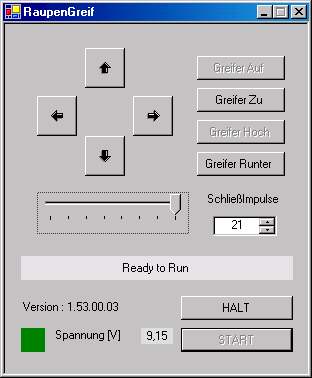
gebaut wurde. Steuerung wahlweise über Maus oder Tastatur (Pfeile : Fahren, Bild : Hub, Pos1/Ende : Greifer). Bequem vom Schreibtisch aus kann man jetzt gelbe Tonnen einsammeln und neben dem linken Fuß abstellen, wenn man das Ding über ROBO RF DataLink - ROBO Interface betreibt. Anmerkungen zum C# BetriebsprogrammDas Programm ist eine Weiterentwicklung des Programms für Raupe pur. Es entspricht daher weitgehend dem obigen. 1 1/2 Seiten Source-Text sind hinzugekommen.
Anmerkungen zur ROBO Pro LösungDie Angelegenheit läuft auf eine Verdoppelung der Threads (grüne Männchen) hinaus (RaupenGreif). Achtung bei Eigenschaften die Anzahl der Prozesse anpassen, eingestellt sind nur fünf. In den neuen Threads gibts die Befehle für Greifer Auf/Zu und Greifer Hoch/Runter, die wieder über Buttons des Bedienfeldes gesteuert werden. Das liegt jetzt tatsächlich auf dem Blatt Bedienfeld, da es auf dem Funktionen-Blatt doch recht voll geworden ist. Man kann natürlich auch sein Zeichentalent voll entfalten und eine Version mit nur einem Thread erstellen, das Programm hat dann deutlich mehr Linien, aber alles wird in einem Thread (Prozess) zusammengehalten. Wie mans macht ist hier wohl Geschmacksache, bei der Performance macht es sich nicht bemerkbar. Download Raupen.ZIP Eine Raupe mit Fernsteuerung über ein zweites Interface gibt es auch noch Stand : 30.09.2008 |