|
| |
FishStep : Schrittmotoren
 Die
Klasse FishStep des Python Moduls FishFa30 ermˆglicht die Die
Klasse FishStep des Python Moduls FishFa30 ermˆglicht die
Programmierung von Schrittmotoren. Einzeln oder im XY-Verbund.
Dazu gibt es die Funktionen :
Einzelner Schrittmotor (an zwei nebeneinanderliegenden M-Ausg‰ngen) :
- StepHome(MotNr)
- StepTo(PosHook, MotNr, Xabs)
- StepDelta(PosHook, MotNr, Xrel)
Zwei Schrittmotoren im XY-Verbund (an drei nebeneinanderliegenden
M-Ausg‰ngen):
- PlotHome(MotNr)
- PlotTo(PosHook, MotNr, Xabs, Yabs)
- PlotDelta(PosHook, MotNr, Xrel, Yrel)
Die Positionierungsangaben erfolgen in Zyklen (a 4 Steps von 7,5∞) gerechtet
ab zugehˆrenden Endtaster (StepTo, PlotTo) oder bezogen auf die aktuelle
Position (StepDelta, PlotDelta). Mit StepHome/PlotHome wird die Nullposition
angefahren.
Beispiel Zeichnen eines Quadrates :
| from FishFa30
import *
def Vieleck(RelList):
for xy in RelList: ft.PlotDelta(None,
1, xy[0], xy[1])
Plotter = 1
ft = FishStep(((1,333),(3,222)))
ft.OpenInterface("COM2")
ft.PlotHome(Plotter)
ft.PlotTo(None, Plotter, 50, 50)
Vieleck(((50,0),(0,50),(-50,0),(0,-50)))
ft.CloseInterface() |
Die Schrittmotoren sind an M1-M3 angeschlossen, der maximale Fahrweg betr‰gt
333/222 Zyklen in X/Y-Richtung (ft = FishStep)
Mit PlotHome wird die Null-Stellung angefahren. PlotTo f‰hrt zur linken unteren
Ecke des zu zeichnenden Quadrats (Koordinaten 50/50 bezogen auf den Nullpunkt).
Anschlieþen wird mit PlotDelta ¸ber die Funktion Vieleck ein Quadrat mit 50
Zyklen Kantenl‰nge gezeichnet.
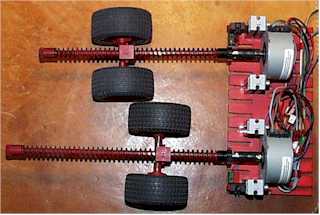
Wenn man denn gerade keinen Plotter auf dem Schreibtisch stehen hat und auch
die M¸he scheut, schnell einen zu bauen, startet man ein Elefantenrennen :
An die ohnehin schon zu Testzwecken aufgebauten Schrittmotoren steckt man
mˆglichst viel Schnecke und an die Schneckenmutter steckt man je zwei
Jumbo-R‰der. Das Quadratzeichnen kann beginnen :
- Die R‰der rollen eintr‰glich, nebeneinander und gleichzeitig in Richtung
Endtaster (vor den grauen Motortr‰gern). Ist einer eher da wartet er auf
den anderen (PlotHome)
- Es geht wieder 50 Zyklen zur¸ck in Richtung Schneckenende, schˆn im
Gleichschritt (PlotTo).
- Und nun abwechselnd, mal der eine, mal der anderer jedoch immer 50 Zyklen,
hin oder her.
Das wars (man kˆnnte sie nat¸rlich auch noch ¸berkreuz stellen).
Beispiele und Handbuch sind in PythonFish30.ZIP
enthalten.
Stand : 05.09.2003
|