|
|
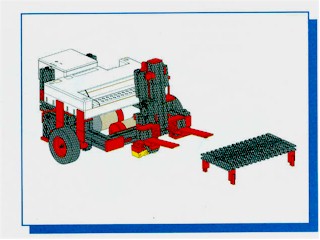
Mobile Robots II von 2002 : FTS
Freier Nachbau aus "Mobile Robots" von 2002 (Download des Buches von
http://www.fischertechnik-museum.ch/museum/thumbnails.php?album=72&page=7) Das Betriebsprogramm gibt es in einer VB2005 und einer C# 2005 Version :
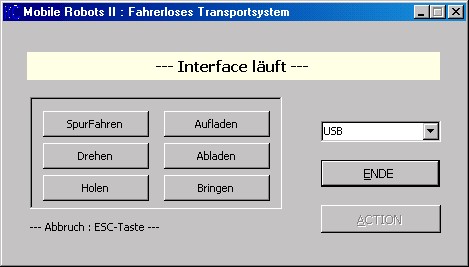
Schwerpunkt des Programmes liegt auf dem Experimentieren mit den Teilaufgaben des Transportsystems. DownloadAlle Programme sind in fts.ZIP zusammengefaßt. _ReadMe.TXT konsultieren. Eine Lösung für den Robo Explorer Stand : 06.10.2010 |