|
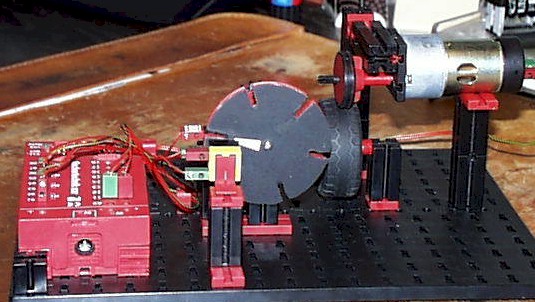
| Drehzahlpr¸fstand f¸r fischertechnik MotorenDie Drehzahl von Motoren, die an ein fischertechnik Interface angeschlossen werden kˆnnen, kann durch diesen Versuchsaufbau festgestellt werden. Dazu muþ ggf. die Motorbefestigung dem jeweiligen Motor angepaþt werden. Direkt auf der Motorwelle wird ein Reibrad (Motorrolle) angebracht das das Meþrad treibt. Auf der Welle des Meþrades ist eine Schnecke angebracht, die ein 20er Zahnrad treibt. Auf der Zahnradwelle ist ein groþes Scheibenrad mit 6 Schlitzen angebracht (Das Rad wurde schwarz hier abgeklebt). Ðber die Schlitze wird eine Lichtschranke (vorn links) aus Lampe an M1 und PhotoTransistor an I1 gesteuert. Der zu pr¸fende Motor ist an M2 angeschlossen.
Die Bestimmung der Drehzahl geht dann weitgehend automatisch. Ggf. sind Durchmesser der Motorrolle und die Meþdauer anzupassen. Das Meþrad selber kann mit Drehzahlen von ca. 10 000 1/min betrieben werden. Also ggf. die Motorrolle kleiner w‰hlen.
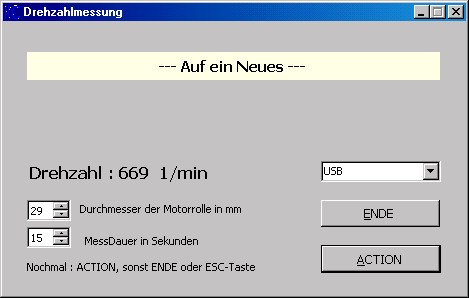
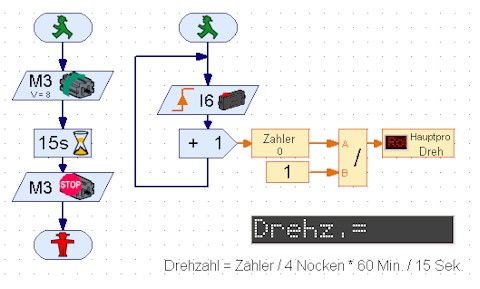
Anmerkungen zum Programm (C# 2005 Variante) : Konstanten const double WalzenradDurchmesser = 52;const double SchneckeZahn = 20; const double ImpulseUmdrehung = 12; const Out Lampe = Out.M1; const int Photo = (int)Inp.I1; const Out Motor = Out.M2; double MotorradDurchmesser; double MessDauer; Berechnung der Drehzahl aus Anzahl Impulse und Messdauer : private int DrehzahlMotor(double Dauer, double Impulse) {double DrehzahlRolle = Impulse / ImpulseUmdrehung * (60.0 / Dauer); double Uebersetzung = WalzenradDurchmesser * SchneckeZahn / MotorradDurchmesser; return (int)(DrehzahlRolle * Uebersetzung); } Im Programm dann noch ein wenig DrumRum : private void Action() {ft.SetMotor(Lampe, Dir.On); ft.SetMotor(Motor, Dir.Left); ft.Pause(1234); ft.ClearCounter(Photo); Zeit = 0; .... ft.Pause(MessDauer * 1000); ft.SetMotor(Lampe, Dir.Off); ... lblErgebnis.Text = Drehzahl(MessDauer, ft.GetCounter(Photo)).ToString("Drehzahl : 0 1/min"); } Download : RCcarRollen enth‰lt die gleiche Lˆsung f¸r C# 2005 und VB 2005 Zus‰tzlich erforderlich : cs2005Fish40Setup.EXE bzw. vb2005fish40setup.exe Und noch eine Anregung f¸r eine einfache Lˆsung mit ROBO Pro :
Minimotor mit Getriebe und 4rer Impulsrad auf der Antriebsachse und zugehˆrendem Taster an I6. Messdauer fest 15 Sek. Stand : 09.08.2009 |