Ansteuerung
Hochgeladen am 1.8.2017, 09:50 von Janft. 2 / 6
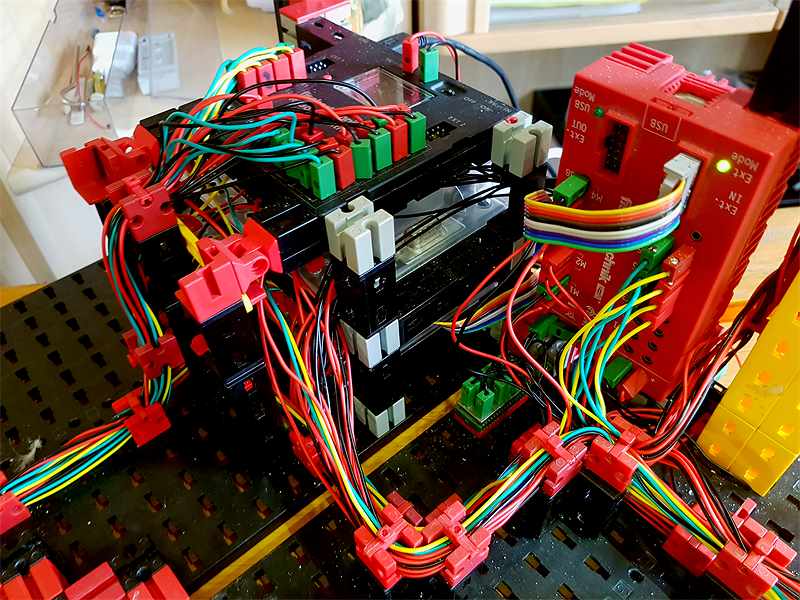
Hier ist die Ansteuerung der ganzen Komponenten zu sehen. Verbaut 1TX, 2Interfaces und ein Extension.
david-ftc (1.8.2017, 10:23:44)
Klasse Modell! Die Kabelführung sieht trotz der Komplexität noch ganz ordentlich aus.
Wofür benötigst du vier Interfaces? Die haben zusammen ja 16 Motorausgänge?!
Wie kommunizieren die Controller untereinander?
Gruß, David
Janft (1.8.2017, 12:13:54)
Der TX ist für die Bewegungen der 4 Achsen X Y Z B, Interface 1 ist für die Spindel, und die Türen zuständig, Interface 2 für Kompressor und einen Teil der Beleuchtung zuständig und das Extension für den restlichen Kleinkram der so anfällt.
Die Interfaces kommunizieren untereinander gar nicht (Ausnahme Interface mit Extension), sondern werden alle von RoboPro angesteuert. Da habe ich jedes Interface eindeutig definiert. Aufpassen muss man bei dem Mischbetrieb von TX und Interface, da sich da die Eingänge unterscheiden. So muss in RoboPro der Eingang I5 eines Interface als C1D angesprochen werden. Dazu steht aber Genaueres in der Hilfe ;-)
david-ftc (1.8.2017, 13:10:36)
Danke für die Erläuterung :-) Das Verfahren des Mischbetriebs habe im im Hinterkopf aber noch nie richtig angewendet.