[5/7] 3D-XYZ-G
Hochgeladen am 5.3.2008, 18:08 von Udo2. 5 / 7
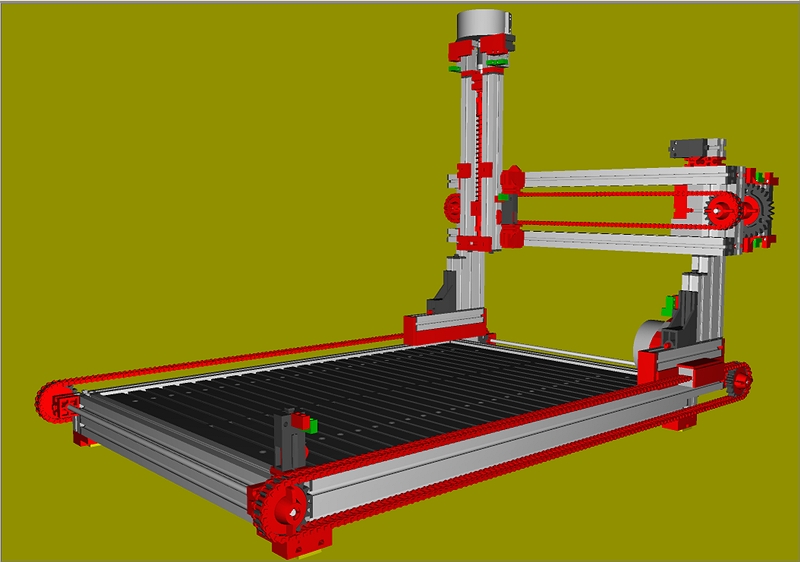
Hier noch eine der weiter konstruktiv vorbereiteten Getriebevarianten Schrittmotorübersetzung 3:1 mit Kettentrieb 2:1. Das Modell erreicht rechnerisch 0,208mm/Schritt und 10mm/Motorumdrehung als ein Kompromiß zwischen Schrittauflösung und Lineargeschwindigkeit. Diese Schrittauflösung könnte als niedrig angesehen werden. Aus der Praxis der Technik sei hierzu aber vermerkt, daß eine rechnerisch ermittelte Genauigkeitsstufe praktisch erst erreicht wird, wenn das “Drumherum” des technischen Gebildes wie etwa Statik und Mechanik um eine Zehnerpotenz bzw. um eine Kommastelle genauer ist. Da bei Schrittmotoren mit der Erhöhung der Ansteuerfrequenz die Drehzahl sich mit abfallendem Drehmonent erhöht, ist man gut beraten am Abgang des Motors bei vorhandener Drehzahlreserve ein geeignetes Getriebe zu platzieren. In der Z-Achse wurde der Schneckentrieb belassen. Schrittmotoren dieser Achse werden vergleichsweise heiß, weil sie z.B. im Plotterbetrieb während der gesamten Zeichenlänge zur vertikalen Sicherung des Schreibstiftes eingeschaltet bleiben. Die Praxis wird zeigen, ob die mechanische Selbsthemmung des Schneckentriebs ein Abschalten des Schrittmotors ermöglicht. Das soll eine noch angedachte Eliminierung des Spindeltriebspiels unterstützen.
Stefan Falk (5.3.2008, 21:36:56)
Ich hab noch überhaupt nicht verstanden, wie die beweglichen Schlitten denn gelagert sind. Könntest Du dazu noch ein paar Worter verlieren bitte?
Gruß, Stefan
Udo2 (6.3.2008, 09:07:52)
Hallo Stefan, natürlich mache ich aus meinen Modellentwicklungen keine Geheimnisse. Weitere Erklärungen hätten aber auch die Bilduntertexte erheblich verlängert. In Abhängigkeit des allgemeinen Interesses werde ich gern Auskunft oder Erklärung geben. Ich bin aber noch ein ft-Newcomer, der sich gegenüber den erfahreneren ft-Spezialisten logisch auch etwas zurückhält. Gruß Udo2
Stefan Falk (6.3.2008, 09:30:09)
Tach auch!
Na dann zur Ermunterung: Halte Dich bitte nicht zurück! Deine Konstruktionen sind genauso gut wie andere hier, und wir haben auf der ft Community alle Alters- und Erfahrungsgrößengruppen vertreten.
Gruß, Stefan
remadus (6.3.2008, 18:48:15)
Hallo Udo,
eine sehr schön schlanke Konstruktion hast du da, die mir sehr gut gefällt. Oftmals geraten Plotter sehr klobig, weil man das Getriebe nicht unterkriegt.
Leider verrät die CAD-Konstruktion nichts über die Maschinendynamik. Hier wird es ein paar Knackpunkte geben. Ganz schwierig sind die langen Ketten, die sich wie Gummischnüre benehmen und der sehr hoch angeordnete Hebemotor.
Eine sehr bewerte Konstruktionsregel ist, bewegte Massen in deren Schwerpunkt anzufassen.
Bis dann Remadus
Udo2 (6.3.2008, 19:32:07)
Hallo Martin, alle 3 Achsen sind bereits mit Schrittmotorantrieb verfahren worden. Wir werden mal sehen, wie es dann programmgesteuert aussieht. Ja, in der Praxis der Technik spricht man vom Auflegen der Ketten. Diese sind aber “steif”. Bei ft spanne ich auf Grund der Elastizität des Perlonwerkstoffs die Ketten beidseitig gleich auf und gefühlsmäßig in die Nähe der Elatizitätsgrenze mit der Klippöffnung der Kralle nach außen. Habe damit gute Erfahrungen gemacht und hier dann “zahme Gummischnüre”. Der Z-Motor steht hier in der oberen Endlage der Z-Achse. Er kommt den ganzen Z-Weg mit dem Schlitten runter. Gruß Ingo
Udo2 (6.3.2008, 20:23:28)
Hallo Martin, noch eine Ergänzung. Der Leertrum der Ketten kann bei Bedarf noch zusätzlich mit einem Spannrad “gezähmt” werden. Der Platz ist dafür fallweise schon vorgesehen. Werde noch eine Abbildung mit Z im unterem Totpunkt bringen … Gruß Ingo