|
| |
WebCamera steuert einen Industry Robot
Ein Programm von Pierre Schwieger
Das
Modell :
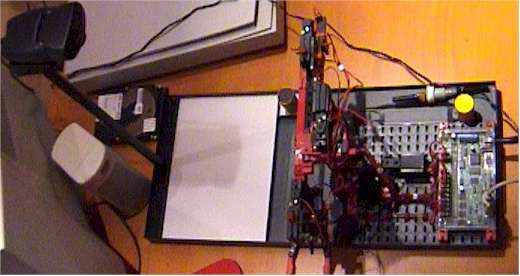
Über einem ganz normalen Industry Robot (Säulenrobot oder Knickarmrobot) ist
eine einfache WebCamera (USB, SER, PAR, FW ...mit einer Auflösung von min. 320
* 240, im Bild links oben) aufgebaut, die den Greifraum (ca. 250 mm in der Breite) des Robots
aufnehmen kann (im Bild die weiße Fläche). Eine in diesem Greifraum aufgestellte "Gelbe Tonne"
wird von der "Automatik" photographiert und einer Mustererkennung zur
Erkennung der Position der Tonne zugeführt. Dann schlägt der Robot zu : er packt die Gelbe Tonne
und stellt sie auf eine vorher festgelegt Sammelposition.
Das Programm :
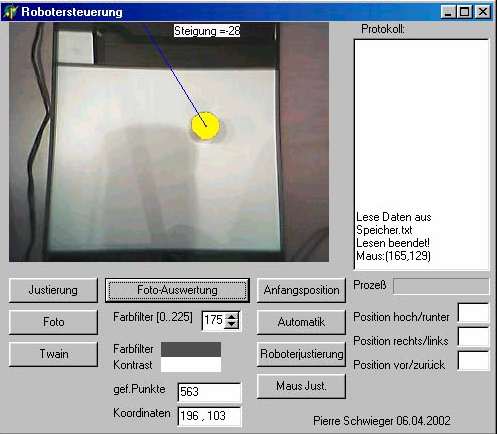
Das Steuerprogramm umfaßt die für den oben beschriebenen
Betrieb erforderlichen Funktionen :
-
Roboterjustierung zur Festlegung der Roboterpositonen
im realen Greifraum (Gitternetz von Punkten auf einer Papierunterlage, siehe
Bild).
-
Mausjustierung der Roboterpositionen auf dem Photo
der WebCamera.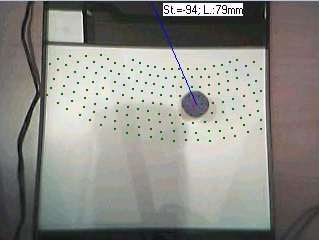 Die dabei gewonnenen Werte (5 * 175 Koordinaten) werden in entsprechenden
Dateien gespeichert (soll1, soll2, soll3, FotoX, FotoY). In der Regel reicht
eine Justierung nach dem Aufbau des Modells.
Die dabei gewonnenen Werte (5 * 175 Koordinaten) werden in entsprechenden
Dateien gespeichert (soll1, soll2, soll3, FotoX, FotoY). In der Regel reicht
eine Justierung nach dem Aufbau des Modells.
-
Automatik startet einen Such-, Erkennungs- und
Abstell-Zyklus für eine im Greifraum des Robots abgestellte Tonne. Das
Programm löst dabei die WebCamera aus. Das so gewonnene Bild wird mit dem
bei der Justierung gewonnenen Daten verglichen (Mustererkennung) und daraus
dann die Koordinaten bestimmt. Und dann greift der Robot ein und stellt die
Tonne auf die vorgegebene Position ab.
Das Programm ist in Delphi 5 geschrieben und wurde unter Windows
98SE getestet (Delphi 4 geht auch).
Die Delphi 5 Quellen und eine Kurzbeschreibung sind in WebCamRobot
enthalten
|