|
| |
Turm von Hanoi - Robo TX Controller
Lˆsungen f¸r Java, C# 2008, VB2008 und Python 3.1.1
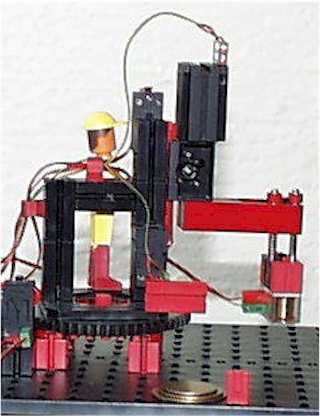 |
Der Hanoi Robot ist ein Eigenbau der auf dem
Schweiþroboter-Chassis des Computing Starter Kits basiert. Er entspricht
hier weitgehend dem Hanoi Robot von 1984. Allerdings wurde die Technik
modernisiert :
M1 : S‰ulenmotor mit Impulsrad und Endtaster an I1, Impulstaster an C1
M2 : Armmotor mit Endtaster oben I3 und unten I4
O5 : Gefedert gelagerter Magnet (neuere Version bei Knobloch
: 32363 - 17,20 Euro)
Gestapelt werden die Eisenscheiben, die im Bild vorn (PosA) neben dem
Winkel liegen. Verdrahtet wurde "fliegend". Der Magnet ist an
einem Grundbaustein 15 befestigt, der wiederum durch zwei Stein 7.5
gest¸tzt wird. Hier stecken im Grundbaustein zwei Stahlachsen mit
geriffelten Enden. Man kann aber auch zwei schwarze Klipp-Achsen 45
nehmen, die man so verdreht, dass sie klemmen, die Feder auf der Achse
dient der Schˆnheit, es geht auch ohne sie.
Siehe auch "Ðber das Scheibenschichten"
|
Vorgestellt werden Console-Programme f¸r die Programmiersprachen Java 6 -
Eclipse, C# 2008 Express und VB2008 Express. Dabei wurde auf gleichen Aufbau der
Programme geachtet, so ist auch ein Vergleich der verwendeten
Programmiersprachen mˆglich. In allen F‰llen wurde die Klasse FishFace(TX)
verwendet.
Zum Aufbau
- Eine Klasse mit der Methode main() zum Start des Programms. Bei C# und Java
aus Gr¸nden der Instanzierung noch eine weitere Methode action().
- Der Zugriff auf den HanoiRobot wurde in einer gleichnamigen inneren Klasse
zusammengefasst.
- Eine Methode Hanoi mit der Hanoi-Logik und ¸ber HanoiRobot.Ziehe() Zugriff
auf den HanoiRobot.
- Die innere Klasse HanoiRobot wurde von FishFace abgeleitet und bietet deswegen
auch den Zugriff auf dessen Methoden.
- HanoiRobot bietet einheitlich die Methoden Grundstellung(), Ziehe(),
SauleNach(), ArmSenken() und ArmHeben(). Von auþen wird noch auf die
FishFace-Methoden OpenController/CloseController() zugegriffen.
- HanoiRobot nutzt intern die FishFace-Methoden SetLamp(GreiferMagnet),
StartRobMotor(S‰uleFahren)/WaitForMotor() und
SetMotor(ArmFahren)/WaitForInput().
Kommentare zum Code sind bei der Java-Lˆsung
zu finden
Java 6 - Eclipse 3.4
Lˆsung f¸r Java 6 - Eclipse 3.4 und den Robo TX Controller und
ftcomputing.roboTX.jar.
C# 2008 Express
Lˆsung f¸r C# 2008 und die
FishFaceTX.DLL
VB2008 Express
Lˆsung f¸r VB2008 und die FishFaceTX.DLL
Python 3.1.1
Lˆsung f¸r Python und FishFaTX.PY
Stand : 21.04.2010
|