|
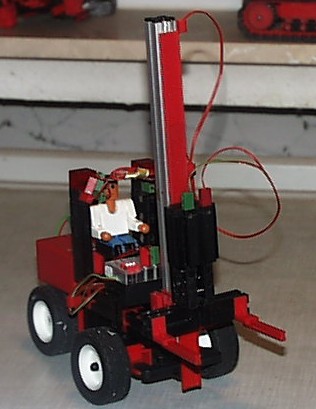
| Gabelstapler : Fernsteuerung über Control Set
Antrieb hinten über Mini Motor mit aufgesetztem Getriebe und
einer Stahlachse (60 mm) mit Zahnrad und fest aufgeklemmten Rädern. Der Motor
ist rechts unten erkennbar, er ist tragend in den Aufbau integriert.
Vorderachse mit Lenk-Servo, Aufbau wie in der Doku des Control Set von 2008 beschrieben.
Hier ein Gabelstapler mit Hinterachlenkung und unter Einsatz des alten IR Control Sets. Die Hinterachse wird dadurch deutlich breiter. Um den gleichen Achsabstand einhalten zu können (sonst sieht das Ding zu lang aus) wurde der hier zum Antrieb der Vorderachse (Diffential) verwendete Powermotor senkrecht gestellt. Das hat ja auch so seinen Reiz. Der Lenkungsmotor wurde direkt über der Hinterachse eingebaut und an den Bauplatten unter dem Akku befestigt.
Nochmal der Gabelstapler von oben und von vorn. Inzwischen hat Dominik den Stapler ein wenig getunt.
Ein weiterer Gabelstapler mit Antrieb über Powermotor, der jetzt aber wieder waagerecht liegt. Deswegen kann er auch nur mit dem neuen Control Set und dessen Servo betrieben werden. Neu ist hier die Möglichkeit, die Stapelsäule über den Mini Motor im Vordergrund zu kippen. Auch ein Argument für das neue Control Set. Bei dem im Photo gezeigten Modell handelt es sich noch um einen Prototyp mit dem alten IR Control Set. Das neue ist z.Zt. im Modell darüber unterwegs. Stand : 02.02.2009 |