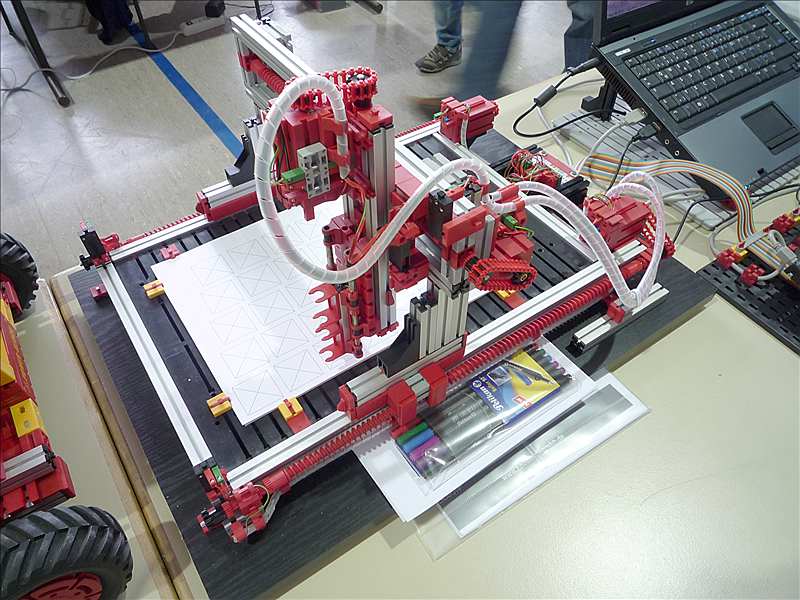
[3/5] Portalroboter 3D-XYZ-GES, Modellansicht
Hochgeladen am 30.9.2010, 14:02 von Udo2. 10 / 13
Ausführliche Beschreibung unter http://www.ftcommunity.de/details.php?image_id=28068
Bennik (8.10.2012, 18:14:12)
Hallo Udo2,
wie machst du es, dass sich die Encodermotoren nicht “verzählen”. Ich habe auch schon einige Portalroboter und Plotter gebaut. Die Motoren waren aber nie richtig genau.
Gruß, Bennik
Udo2 (1.11.2012, 16:49:17)
Hallo Bennik, habe leider erst heute deinen Kommentar entdeckt. Ich bin bei meinen beiden Portalrobotern aber wegen Zeitmangel erst der Fortentwicklung der Achsengenauigkeit. Ich weiss zwar nicht, welche Getriebe du zum Antrieb der Achsen anwendest. Dennoch darf ich dir sagen, dass zu 99% in erster Linie wir Konstrukteure mit der Statik und Dynamik unserer Modelle an den Abweichungen beteiligt sind … Bei meinem 3D-XYZ-GES (Gleitführung mit Schneckengetriebe) waren/sind es z.B. Verdrehungen der Schneckenteile im mittleren Bereich der Schneckenwellen und bei meinem 3D-XYZ-REK (Rollenführung mit Kettengetriebe) waren es z.B. die Klemmungen der Zahnräder auf den M-Achsen … Mein noch einfaches Programm mit den bewusst vielen Richtungsänderungen führt solche Ursachen stets ans Tageslicht … Gruss, Udo2
Udo2 (1.11.2012, 19:41:29)
pardon: statt Dynamik ist richtig Mechanik