Bodenplatte
Hochgeladen am 12.3.2007, 18:06 von Severin. 5 / 47
remadus (13.3.2007, 08:50:58)
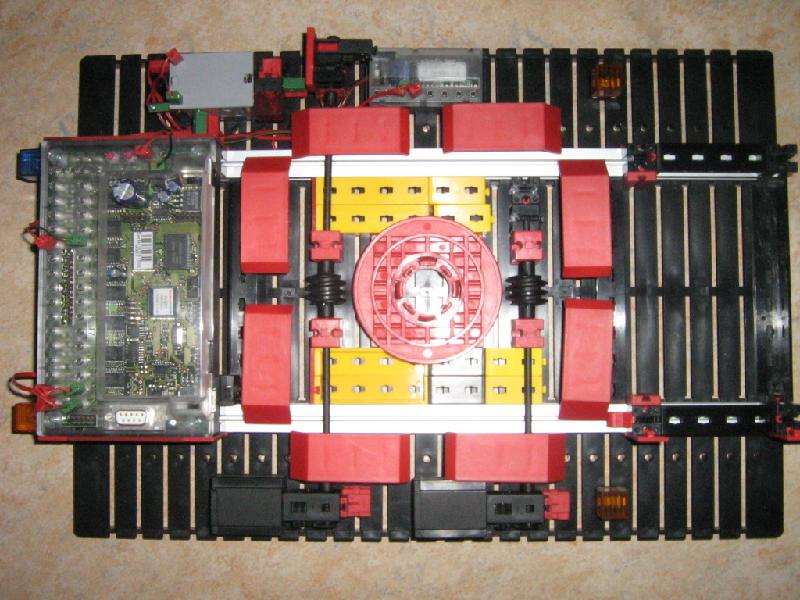
Ich nehme an, mit den ebenen Platten wird die Aufstandsfläche vergrößert. Das hilft bei der Standfestigkeit sehr. Kleiner Tip: die beiden Schnecken für den Schwenkantrieb sollten sorgfältig parallel arbeiten, sonst blockiert sich der Antrieb selbst oder es werden zwei handverlesene Motoren verwendet, die sehr ähnliche Drehzahlen laufen.
wahsager (13.3.2007, 14:02:35)
Remadus hat Recht. Du brauchst eine sehr, sehr gute mechanische Verbindung zwischen den beiden Schneckentrieben.
Die Kotflügel sind aber die beste Idee, die ich hier seit Monaten sehe. Das sieht enorm vielversprechend aus.
… wie ich sehe, setzt du Aluprofile ein. Wenn du die Teile hast, dann bemüh dich um Aluprofile im zweiten Armteil und im Handgelenk. Du wirst am Ende ohnehin den Roboter auf eine Holzplatte schrauben werden, damit dir die Platte 1000 nicht abhaut … eventuell bringen die Profile im Sockel nicht ganz so viel wie anderswo.
DerMitDenBitsTanzt (15.3.2007, 09:18:49)
Glückwunsch zu der Idee mit den Kotflügeln! Welchen Zweck haben die Winkelträger? Die Drehscheibe unterstützen und gegen Verdrehen sichern?
Severin (15.3.2007, 21:08:51)
Ja genau
Gruß Severin
Severin (15.3.2007, 21:11:42)
An wahsager: also ich hab den Roboter 12 umdrehungen machen lassen und es ist nichts passiert. Mal schauen wie sich des dann auf wirkliche dauer macht.
Gruß Severin