Portalroboter-Antrieb Y-Achse
Hochgeladen am 21.3.2015, 18:16 von Jahnn. 5 / 10
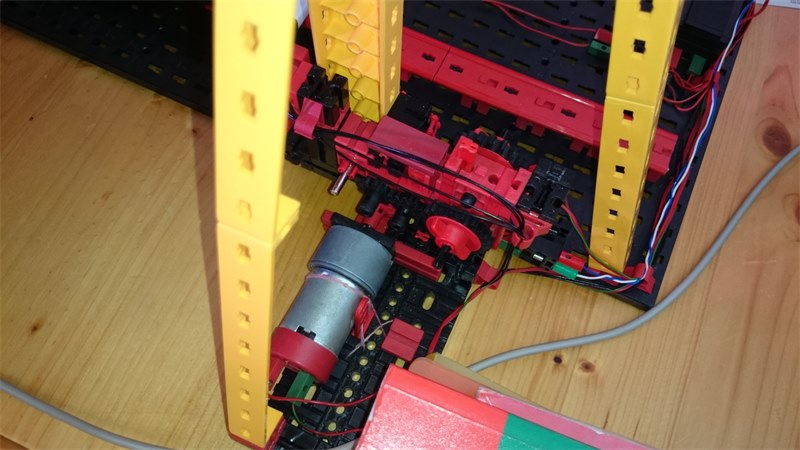
Die Kette für die Y-Achse wird auf beiden Seiten angetrieben. Da das Standartzahnrad für die “Umdrehungserfassung” nicht genügend Schritte hat, verwende ich hier ein Zahnrad. Diese Lösung ist aber nicht perfekt, da sie durch ein großes Spiel ungenau wird, wenn man oft hoch/runter fährt.
Stefan Falk (22.3.2015, 10:18:45)
Da ist ein schönes Teil! Wenn das Problem mit den zwei Motoren die sich aufaddierende Ungenauigkeit ist, könntest Du z.B. die Hübe im Programm mitzählen und nach N Hüben beide Motoren nach oben bis zu den Endlagentastern fahren, um wieder beide in eine definierte Position zu bringen. Wenn es die zu geringe Auflösung des Impulszahnrades ist, hilft evtl. http://www.ftcommunity.de/categories.php?cat_id=1696
Gruß, Stefan
Jahnn (22.3.2015, 21:42:56)
Danke! Ich werds mir mal anschauen