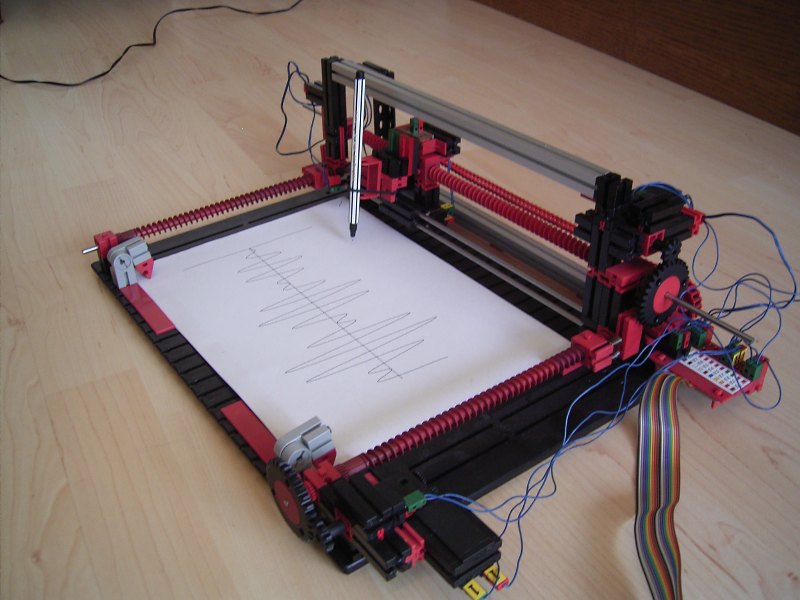
Gesamtansicht 2
Hochgeladen am 29.3.2005, 00:25 von Stefan Falk. 2 / 12
Er hängt an einem alten Parallel-Interface, weil ich mein Robo-Interface noch nicht schön von .NET aus ansteuern kann. Die Mechanik ist recht simpel, funktioniert aber gut.
Udo2 (30.7.2009, 21:30:31)
Hallo Stefan, ausgehend von meinen Erfahrungen mit den 6 Minis beim Rotopod dürfte aber dennoch am Ende der kürzeren Achse bei Synchronstart ab Achslänge 0 zwischen beiden eine sichtbare Toleranz der Wegstreckenlänge kurze Achse zu sehen sein. Oder hast du Mehl gehabt und zwei “gleiche” Motoren gegriffen bzw. auswählen können? Die Software *.NET ist von UM? Gruß Ingo
Stefan Falk (30.7.2009, 22:28:40)
Tach Ingo,
das lief durchaus sauber, weil es ja softwaremäßig wie Schrittmotoren behandelt wurde. Immer eine Änderung eines Impulstasters (egal ob 0-1 oder 1-0) ist ein Schritt, und da gab es nur dann mal Schrittfehler, wenn der Bildschirmschoner meinte, mal eben etwas die anderen Prozesse anzuhalten.
Die .net-Software war von mir, aber die Anbindung fürs Interface an .net war die von UMueller, ja.
Gruß, Stefan
Udo2 (31.7.2009, 14:12:38)
Hallo Stefan, Das ist natürlich nur die Wegstrecke betrachtet klar, trotzdem muß ich da jetzt noch mal nachhaken. Konntest du damit z.B. eine “saubere” (im Rahmen der Auflösung stufige) Quadratdiagonale fahren, bei der beide Achsen zur gleichen Zeit am diagonalen Eckpunkt ankamen? Wahrscheinlich hast du dann hier mit deiner Software beide Motoren impulsweise synchron gesteuert? Gruß Ingo
Stefan Falk (1.8.2009, 11:05:26)
Moin Ingo,
genauso ist es. Das wirkt wie Schrittmotoren, und es gibt keine kumulativen Fehler.
Der implementierte Bresenham-Algorhytmus zum Zeichnen einer beliebigen geraden Linie ist insofern auf diese Maschine optimiert, dass bei einer längeren senkrechten oder waagerechten Strecke (über einige “Pixel” hinweg) der Motor aber ständig eingeschaltet bleibt. Nur bei einer Schrägen Linie, die per Definition immer nur 1 Schritt in beide Richtungen geht, werden beide Motoren eingeschaltet, und der, dessen Impulstaster zuerst einen Impuls meldet, wird ausgeschaltet, bis der andere auch “ankam”. Letzterer läuft aber auch ohne zu stoppen durch, wenn eine längere 45°-Linie gebraucht wird.
Wenn mit abgehobenem Stift zu einem Punkt gefahren werden muss, laufen beide Motoren einfach voll durch, bis sie ihre jeweilige Position erreicht haben, um solche Bewegungen schneller durchzuführen, also mit weniger oft Abschalten zwischendurch, wie es bei einer zu zeichnenden Linie notwendig wäre.
Ich hätte ein Video machen sollen. ;-)
Gruß, Stefan
Udo2 (1.8.2009, 23:48:43)
Hallo Stefan, ist dieses “Potential” eigentlich allgemein bekannt? Ein Video muß ja nicht immer gleich sein. Mir scheint aber, daß du das im Bilduntertext etwas verschwiegen hast :o) Gruß Ingo
Stefan Falk (2.8.2009, 01:55:32)
Hallo Ingo,
naja, wenn es kumulative Fehler gäbe, wäre das als Plotter ja nicht zu gebrauchen und verdiente auch nicht diesen Namen. Von einem “Plotter” muss man imho annehmen können, dass er wie erwartet funktioniert. Sonst geht er bestenfalls als Malmaschine oder als Fehlversuch (http://www.ftcommunity.de/categories.php?cat_id=724) durch.
Gruß, Stefan