defiant_prototyp_3_rad
Hochgeladen am 11.6.2008, 22:04 von Defiant. 1 / 5
Schlagworte: mobile, robot, test, bürstenlos.
Einige von euch wissen schon, daß ich große Probleme habe, meine beiden neuen superschnellen Motoren in meinem jetzigen mobilen Roboter zu kontrollieren. Die neuen Motoren machen schnelle Geschwindigkeiten (>30cm/s) sehr gut mit, aber für langsame Fahrten, oder genaue Steuerungen kann ich sie leider nicht verwenden. Deswegen diese Idee:
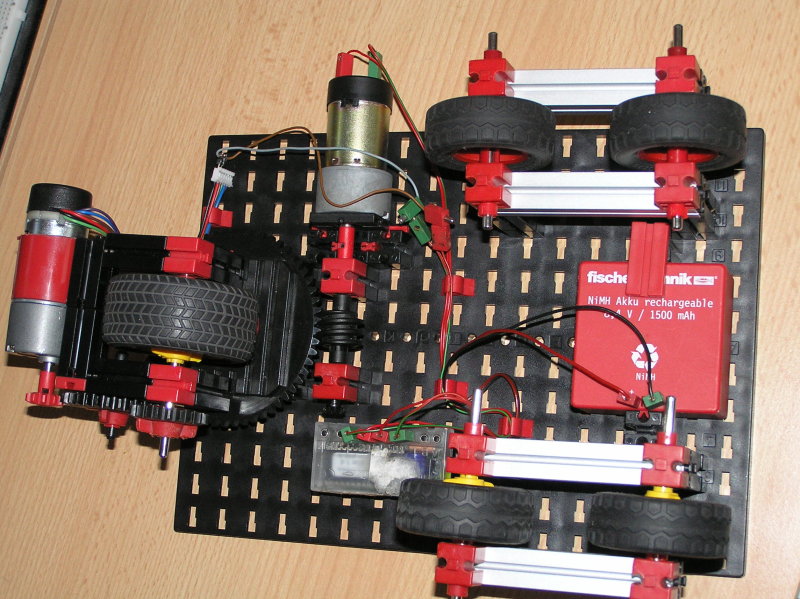
- Vorne sitzt ein normaler Motor wie auf den Bild zu sehen.
- Der vordere Motor wird bei bedarf weggeklappt/eingezogen.
- Hinten kommen die schnellen Motoren ran.
Das ganze soll dann so laufen:
Bei langsamen Geschwindigkeiten übernimmt der vordere Motor. Das ganze Modell verhält sich dann wie ein Auto. Die schnellen Motoren hinten drehen dann einfach mit, was nur wenig Kraft kostet.
Für schnelle Geschwindigkeiten wird der vordere Motor eingeklappt und die hinteren, schnellen Motoren übernehmen das Ruder. Das Modell verhält sich dann wie ein Kettenfahrzeug.
Und jetzt möchte ich zur Diskussion einladen.
Harald (11.6.2008, 23:41:06)
Das mag wohl gehen, aber mir wäre das einfach zuviel “Klappmatik”.
Vorschlag: Mit einem Differenzial kann man Drehzahlen addieren und subtrahieren. Je nachdem, wo man die zwei Eingänge hin-definiert, erhält man am dritten Ende die Summe oder Differenz der beiden Eingangsdrehzahlen.
Konkretes Beispiel: schneller und langsamer Motor sind links und rechts vom Differenzial angeordnet, der Diff-Korb treibt das Achsdifferenzial (also den Korb eines zweiten Differenzials) an. Läuft nur ein Motor, hast du die Wahl zwischen langsam und schnell; zusätzlich gibt es einen Extra-Schnellgang, wenn beide Motoren gleichsinnig drehen. Je nach den Übersetzungsverhältnissen kommt bei gegenläufiger Drehung auch noch ein Kriechgang oder aber ein “Null-Gang” (Motoren drehen gleich schnell und gegenläufig, Summe ist Null) dabei heraus.
Gruß, Harald
Defiant (12.6.2008, 08:48:47)
Harald, deine Idee ist mal wieder genial.
Die Frage ist nur, ob das ft-Differential die Kräfte aushält, die ich ihm zumuten möchte. Da werd ich wohl auch noch einen Prototypen bauen.
Abgesehen davon, hätte ein einziehbares Vorderrad noch den Vorteil der unterschiedlichen Höhenregelung, so daß ich meine Ladung auf einer Steigung Waagerecht halten könnte.
heiko (12.6.2008, 09:10:12)
Woran scheitert denn die Regelung bei niedrigen Drehzahlen? Das muss doch.
Defiant (12.6.2008, 17:57:23)
heiko: Sensorlose BL-Motoren müssen eine bestimmte Geschwindigkeit erreichen um die Position des Rotors messen zu können. (Für die genaue Begründung hat google gute Ergebnisse)
Harald: Deine Idee hat bei genauerer Betrachtung leider einen kleinen Nachteil: Sie baut darauf, daß jeweils der inaktive Motor blockieren kann. Das können meine schnellen Motoren leider nicht.
Johannes (12.6.2008, 19:38:01)
Ich finde die Idee sehr gut!
Viele Grüße Johannes
FtfanClub (13.6.2008, 23:25:20)
irgendwas kapiere ich nicht. Ich sehe 2 motore, einen für den vorderen antrieb, den anderen für die Lenkung. Wo sind die schnellen Motore verbaut ?!?
Harald (14.6.2008, 08:26:41)
FtfanClub: Die schnelleren Motoren sind hier noch Zukunftsmusik.
“3. Hinten kommen die schnellen Motoren ran.” – d.h., sie sind jetzt noch nicht dran.
Defiant: stimmt, die Motoren blocken nicht. Schneckengetriebe würden das tun, aber du willst ja schnell fahren.
Harald (15.6.2008, 19:25:41)
Hast du mal ausprobiert, ob die Motoren nicht hinreichend stark bremsen, wenn sie kurzgeschlossen sind?
Defiant (16.6.2008, 07:58:21)
Die Motoren sind 3-polige Bürstenlose Motoren. Einfach kurzschließen geht da leider nicht.
schnaggels (31.7.2008, 12:46:09)
Ein Getriebe zur starken Untersetzung der BLDC Motoren macht keinen Sinn oder? Wie ist denn die maximale Drehzahl?
Defiant (31.7.2008, 13:33:39)
Nöö, bei Übersetzungen verliert man ja Geschwindigkeit…