pneumatischer Zweifinger-Parallelgreifer
Hochgeladen am 22.11.2005, 22:16 von heiko. 1 / 5
Schlagworte: Pneumatik, Greifer, Roboter, Finger, Hand, Modul, Baugruppe.
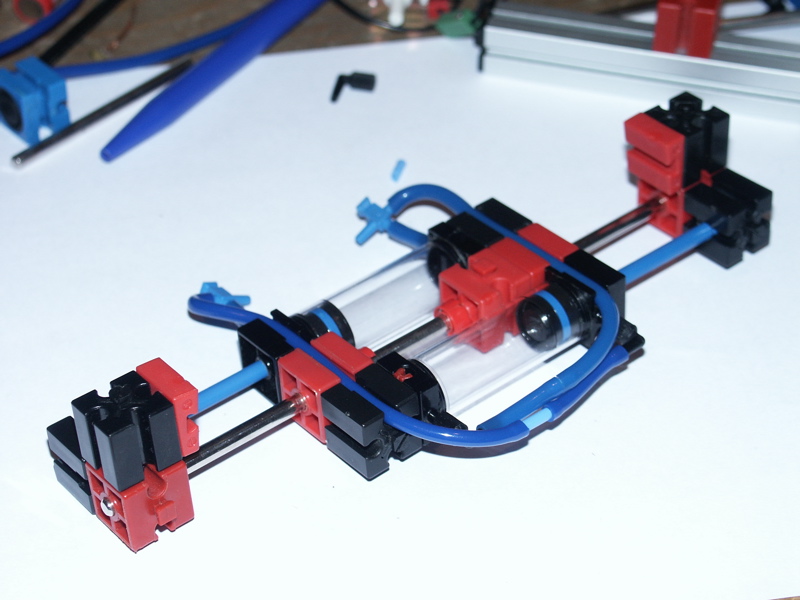
Die Achse, die die Greiferzangen führt, müsste so 150mm lang sein. Der dritte Baustein 15 mit Loch auf dieser Achse sorgt dafür, dass ich den Greifer auf eine Drehscheibe 60 montieren kann.
Ich glaube, sonst ist hier kein Baustein zu viel, und kleiner kann man es auch nicht bauen.
Harald (13.8.2006, 15:49:13)
Stimmt.
Obwohl… wenn man die BS15 allesamt durch Winkelsteine 10x15x15 ersetzt…? ;-)