-beide eindvleugels middels de servo's in de -horizontaal-hoog positie
Hochgeladen am 5.1.2013, 18:08 von peterholland. 26 / 29
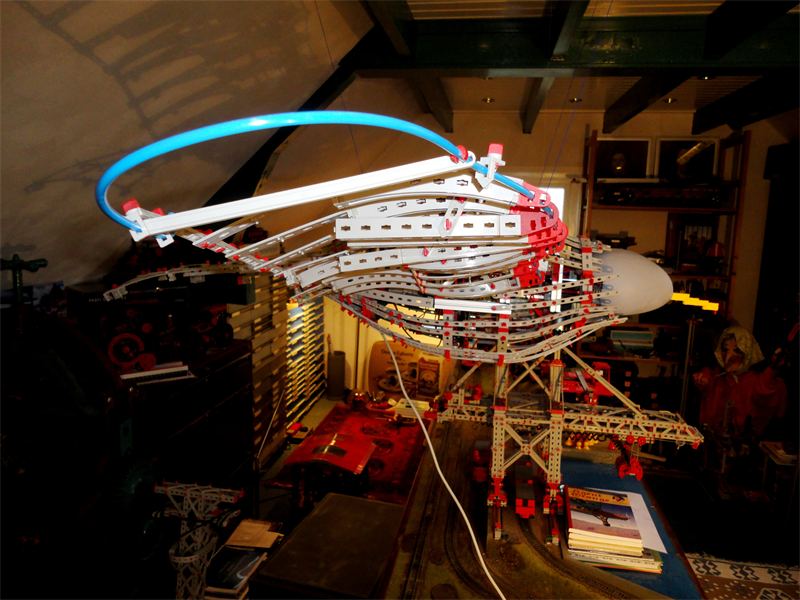
Het Robopro-programma stuurt de 2 FT-Servo-motoren voor de verdraaiing van de “eindvleugels” aan afhankelijk van de centrale vleugelaandrijving-positie.
- Nadat de centrale vleugel-aandrijving schakelaar I-1 (=0-boven-positie) heeft bekrachtigd, gaan na 4 pulsovergangen beide eindvleugels in de -horizontaal-hoog positie middels de servo’s.
- De centrale vleugel-aandrijving gaat ononderbroken door. Na 2 verdere pulsovergangen gaan beide eindvleugels middels de servo’s in de -schuin-laag positie.
- De centrale vleugel-aandrijving gaat ononderbroken door tot I-1 (=0-boven-positie) wederom wordt bekrachtigd en bovenstaande cyclus zich herhaald.