Sharp Distanzsensor an Robo-Interface
Hochgeladen am 3.9.2006, 09:58 von Fischermän. 5 / 7
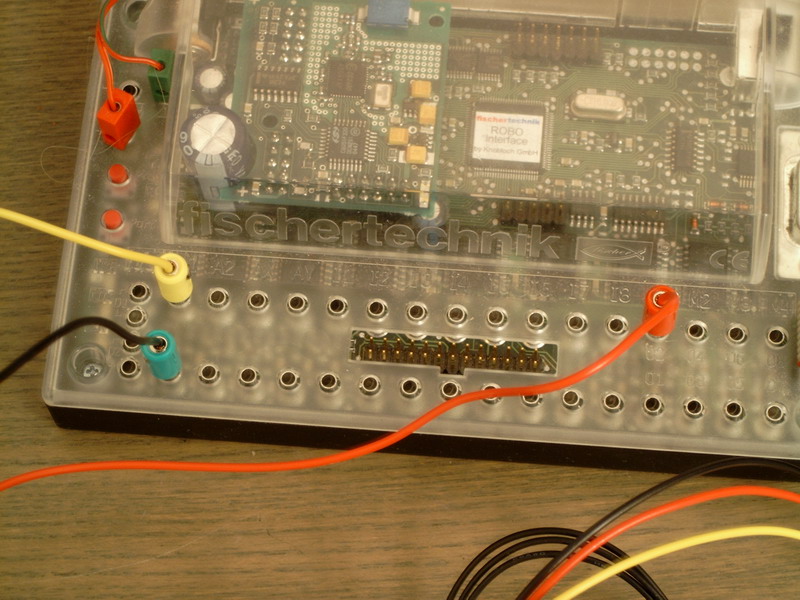
Hier noch eine möglichkeit die 9V Versorgungsspannung über den Motor Ausgang zu holen Roten Stecker an M1 (02) und im Interface Diagnoseprogramm (02) oder Motor rechtslauf einschalten und schon verändert sich je nach abstand zum Sharp Sensor der Wert bei A1