Autonomes Fahrzeug
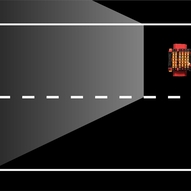
Bei dem seit 2008 jährlich an der TU Braunschweig veranstalteten Carolo-Cup treten Studierendenteams mit selbst entwickelten autonomen Fahrzeugen im Maßstab 1:10 gegeneinander an. Die Fahrzeugmodelle müssen einem Staßenverlauf mit Kreuzungen und unterbrochenen Fahrbahnmarkierungen folgen und selbstständig einparken können (http://www.carolocup.de).
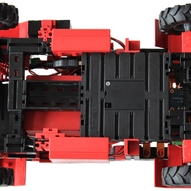
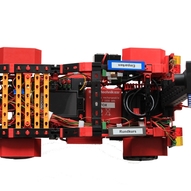
2017 startete erstmals ein Schülerteam (Team RoBoss: Johann Fox und Robin Pfannendörfer vom Bismarck-Gymnasium Karlsruhe) am Vorabend des Hauptwettbewerbs und bewältigte beide Disziplinen fehlerfrei. Hier zeigte sich mal wieder, wozu fischertechnik eigentlich fähig ist: Das Auto basiert fast vollständig auf fischertechnik - mit Ausnahme eines Lasers, eines Servo-Shields und zweier Spannungswandler, die Servo und Servo-Shield mit Spannung versorgen.
Ein Video des Wertungslaufs vom 06.02.2017 gibt es hier: https://youtu.be/K7pG3Md4btM
In dieser Galerie gibt es 5 Bilder: